

Hola, sóc en
Victor Massagué Respall
un Enginyer de Robòtica de Barcelona

Sóc un enginyer de software de robòtica apassionat dels drons. La meva area d'interès cau en la intersecció entre inteligència artificial i robòtica. Estic focalitzat en disenyar algoritmes de planificació de rutes que milloren les habilitats i seguretat dels robots mòbils.
El meu objectiu ambiciós és dissenyar software per robots autònoms que ens ajudaran a explorar l'espai.
Durant el meu temps lliure normalment jugo a futbol, escolto música, cuino alguna cosa bona i quedo amb amics.
Data de naixement: 3 d'Agost 1996
Email: vmassague5@gmail.com
Telèfon: +34 689 69 01 99
Localització: Barcelona, Espanya
Agost 2017 - Juny 2018
Info: Programa de mobilitat per 2 semestres
Lloc: Innopolis, Rússia
Setembre 2014 - Juny 2018
Especialització: Computació
Lloc: Barcelona, Espanya
Gener 2021 - Present
Location: Brussels, Belgium / Barcelona, Spain
Desenvolupament d'algorismes i programari per a l'orquestració de robòtica autònoma
Agost 2020 - Desembre 2020
Location: Innopolis, Rússia
Desenvolupament d'algorismes i programari per a inspeccions autònomes d'UAV en interiors i exteriors.
Agost 2020 - Desembre 2020
Lloc: Innopolis, Rússia
Curs que ensenya els fonaments de la robòtica a estudiants de primer de màster i de quart de grau.
Juny 2019 - Juliol 2019
Lloc: Innopolis, Rússia
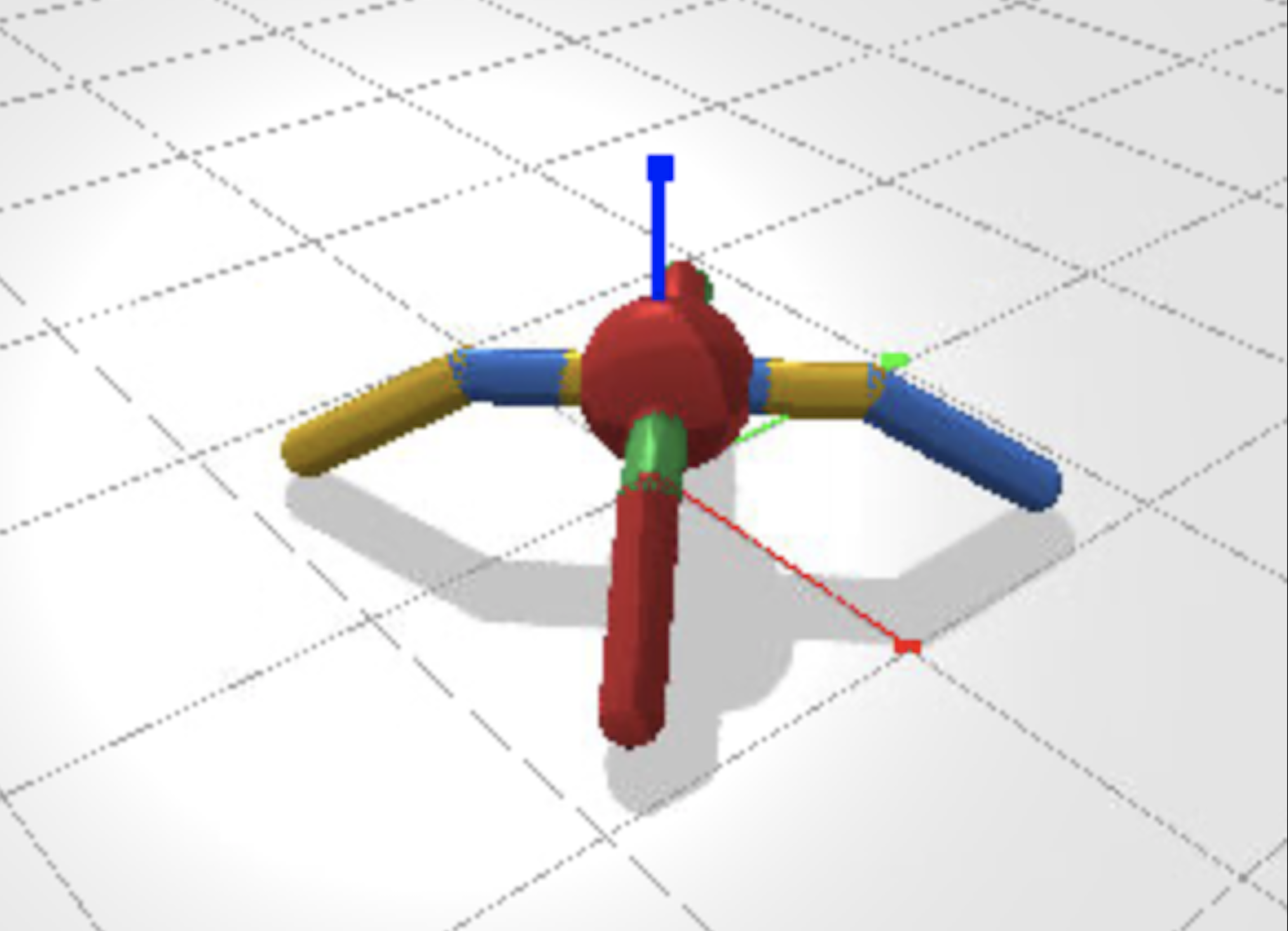
Durant la pràctica, es va desenvolupar un algorisme complet basat en el planificador Next-Best-View per explorar, utilitzant el drone DJI M100, una zona desconeguda delimitada equipada amb Velodyne LIDAR per crear un mapa 3D en línia
Abril 2020 - Maig 2020 | Innopolis University, Innopolis, Rússia
Feb 2019 - Maig 2019 | Innopolis University, Innopolis, Rússia
Nov 2017 - Dec 2017 | Innopolis University, Innopolis, Rússia
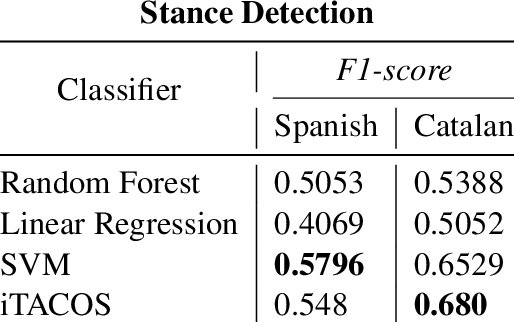
Una tècnica senzilla per a la detecció de postures amb la independència dels tuits de Catalunya.
S'utilitzen funcions d'inserció de paraules word2vec per a aquesta detecció. El sistema ha produït el
millor resultat per a tuits espanyols en comparació amb altres participants a IberEval 2017.
[pdf |
Github]
Feb 2017 - Jun 2017 | Universitat Politècnica de Catalunya, Barcelona, Espanya
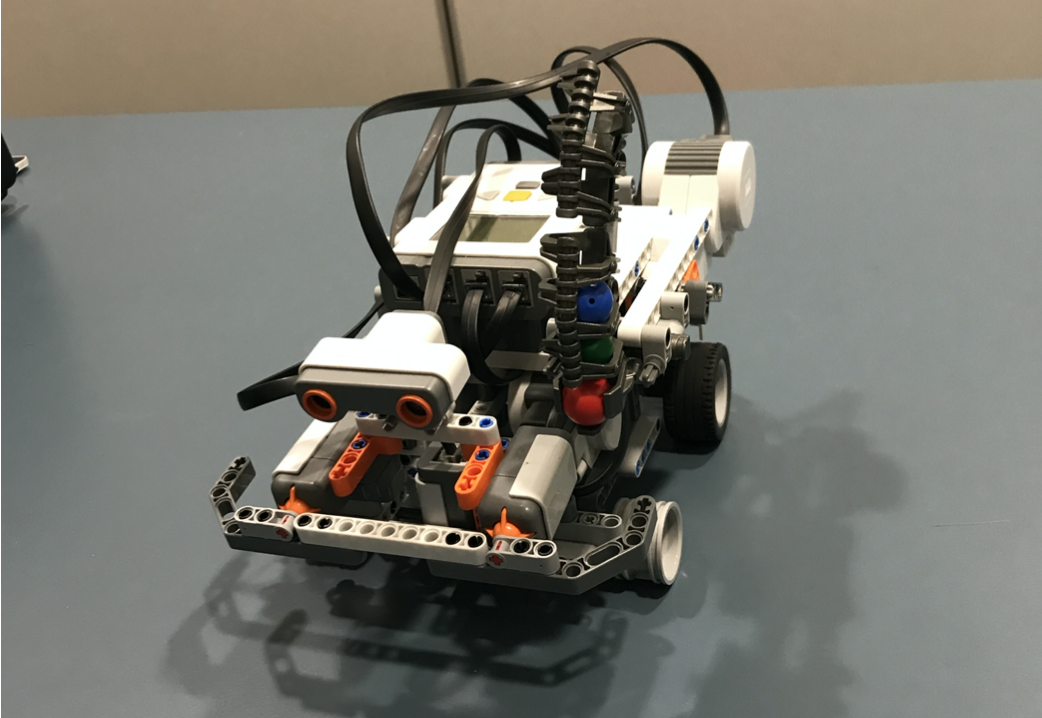
Vaig treballar amb dos companys desenvolupant un llenguatge de programació per facilitar el procés de
programació dels robots Lego Mindstorms. A més, inclou comandes predefinides que simplifiquen un nombre
significatiu de línies de codi. Finalment, inclou un compilador que envia el codi directament al robot.
El projecte es va fer amb Java i ANTLR3.
[pdf |
Github]
Set 2016 – Dec 2016 | Universitat Politècnica de Catalunya, Barcelona, Espanya
Feb 2016 – Maig 2016 | Universitat Politècnica de Catalunya, Barcelona, Espanya
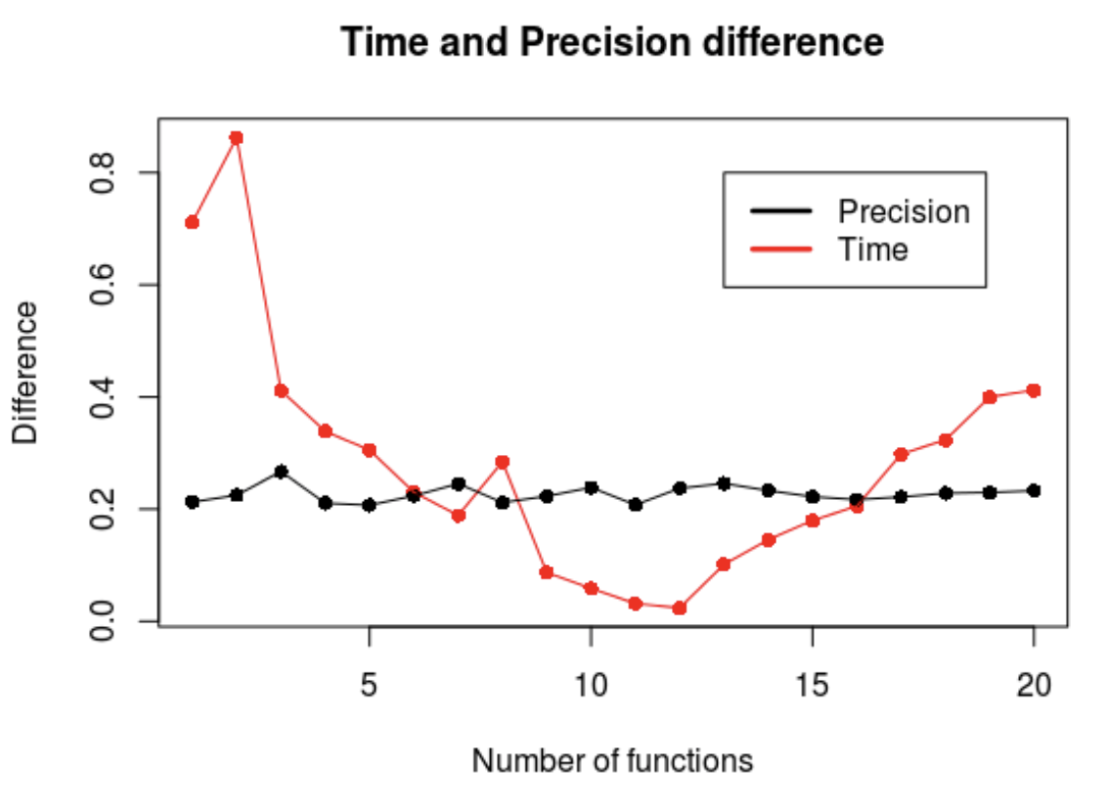
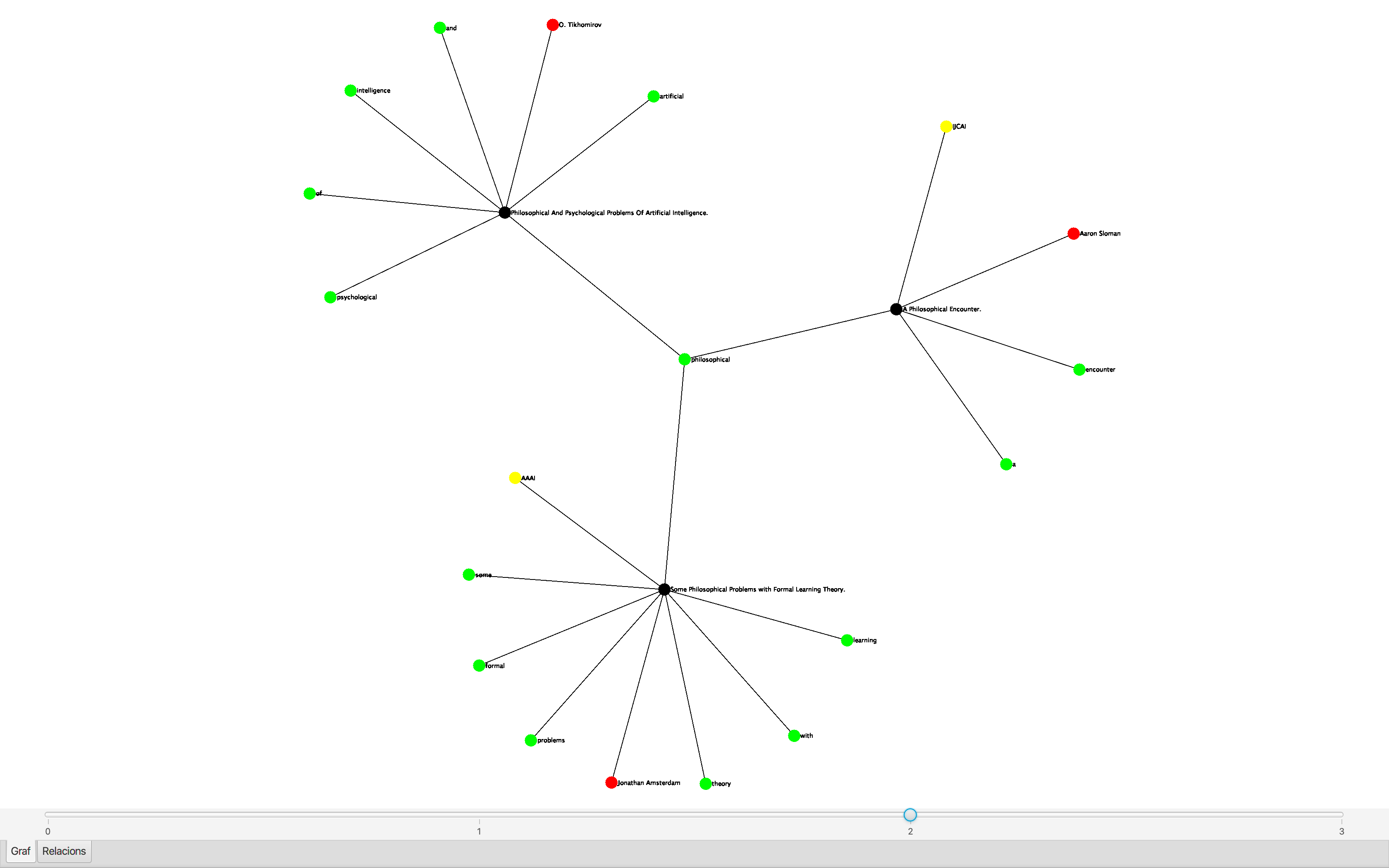
HeteSim és un programa per realitzar cerques relacionals (i normals / simples) en una base de dades
composta com a gràfic, utilitzant la mesura HeteSim per a la relació entre gràfics heterogenis.
La base de dades que s’utilitza per a la implementació és la col·lecció de noms de diferents elements
(de diferents tipus) d’una biblioteca pública d’informàtica.
[Github]

Maig 2013 – Dec 2013 | INS Molí de la Vila, Capellades, Espanya
Aquest va ser el meu projecte final de secundària. Consisteix en un model de 80x50cm d’una casa, aplicant diferents automatitzacions. Per exemple, els sensors de les llums del jardí quan es fa fosc o una porta automatitzada d’obertura / tancament quan un cotxe s’acosta. Tot el projecte es va programar amb Arduino funcionant a bord de dues plaques Arduino UNO.
No dubtis en contactar-me en qualsevol moment per email o telèfon.
110 Sportivnaya Street, Innopolis, Russia, 420500