

Hello, I’m
Victor Massagué Respall
A Robotics Engineer from Barcelona

I'm a robotics software engineer in love with drones. My area of interest lies in the intersection between artificial intelligence and robotics. I'm focused on designing path planning algorithms that improve the capabilities and safety of mobile robots.
My ambitious goal is to design software for autonomous robots that help us explore the space and beyond.
During my free time I usually play football, listen to music, cook something delicious and gather with friends.
Date of birth: 3 August 1996
Email: vmassague5@gmail.com
Phone: +34 689 69 01 99
Location: Barcelona, Spain
August 2018 - July 2020
Location: Innopolis, Russia
August 2017 - June 2018
Info: Exchange program for two semesters
Location: Innopolis, Russia
September 2014 - June 2018
Specialization: Computing
Location: Barcelona, Spain
Jan. 2021 - Present
Location: Brussels, Belgium / Barcelona, Spain
Development of algorithms and software for autonomous robotics orchestration
Aug. 2020 - Dec 2020
Location: Innopolis, Russia
Development of algorithms and software for autonomous UAV indoor and outdoor inspections.
Aug. 2020 - Dec. 2020
Location: Innopolis, Russia
Course that teaches fundamentals of robotics to first year master students and forth year bachelor students.
June 2019 - July 2019
Location: Innopolis, Russia
During the internship, a complete algorithm based on Next-Best-View planner was developed to explore, using the drone DJI M100, a bounded unknown area equipped with Velodyne LIDAR to build a 3D map online of the environment.
April 2020 - May 2020 | Innopolis University, Innopolis, Russia
Feb 2019 - May 2019 | Innopolis University, Innopolis, Russia
Nov 2017 - Dec 2017 | Innopolis University, Innopolis, Russia
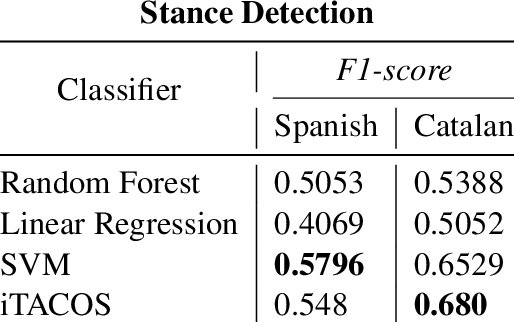
A simple technique for stance detection using the independence of Catalonia tweets. The stance is given
an ongoing interaction, the way speakers place themselves in it. It is used word2vec word embedding features
for this detection. The system had produced the best result for Spanish tweets as compare to other
participants in IberEval 2017.
[pdf |
Github]
Feb 2017 - June 2017 | Polytechnic University of Catalonia, Barcelona, Spain
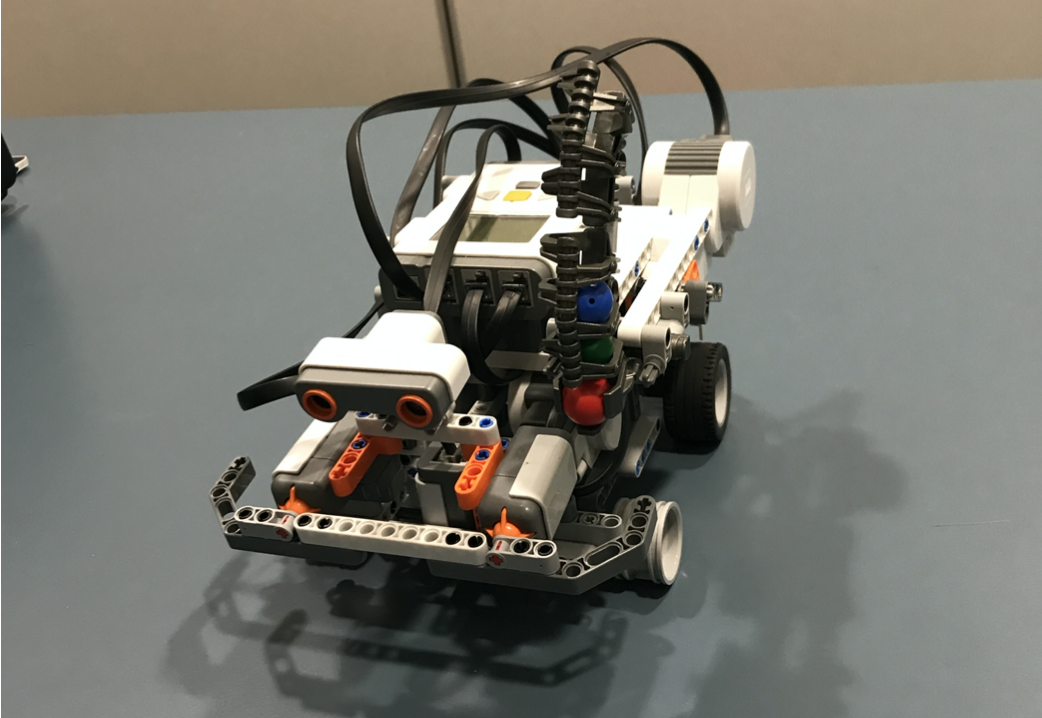
Worked with two colleagues developing a programming language to facilitate the programming process of the
Lego Mindstorms robots. Moreover, it includes predefined commands that simplifies a significant number of
code lines. Finally it inlcudes a compiler that sends the code directly to the robot.
The project was done with Java and ANTLR3.
[pdf |
Github]
Sept 2016 – Dec 2016 | Polytechnic University of Catalonia, Barcelona, Spain
Feb 2016 – May 2016 | Polytechnic University of Catalonia, Barcelona, Spain
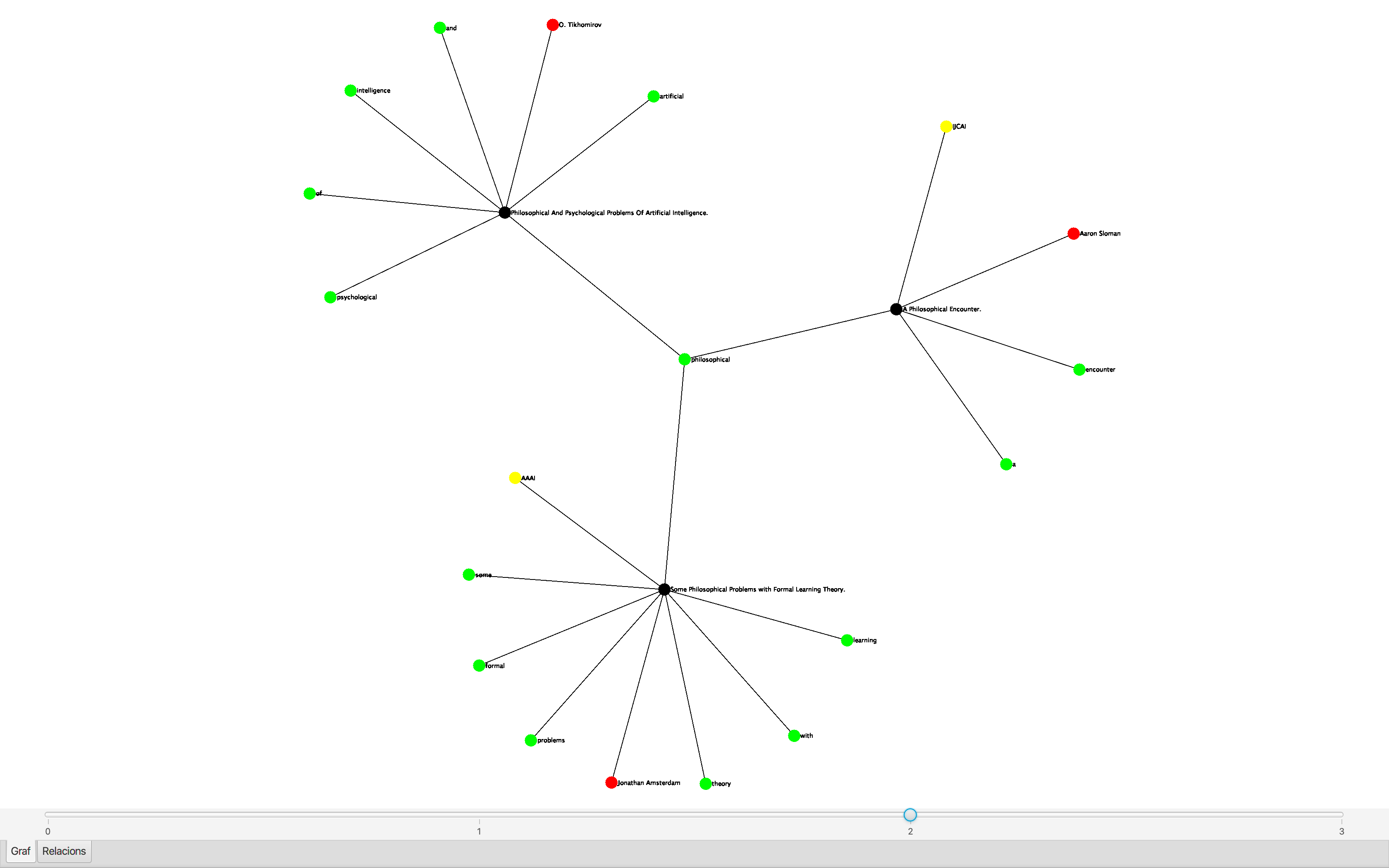
HeteSim is a program to make relational (and normal/simple) searches in a database composed as a graph,
using the hetesim measure for relatedness in heterogeneous graphs. The database used for the implementation
is the collection of names from different items (of different types) from a computer science public library.
[Github]

May 2013 – Dec 2013 | INS Molí de la Vila, Capellades, Spain
This was my final high school project. It consists of a model of 80x50cm of a house, applying different automation. For instance, sensors for the lights of the garden when it is getting dark or an automated opening/closing garage door when a car gets closer. The whole project was programmed with Arduino running onboard two Arduino UNO boards.
Feel free to contact me anytime by email or phone, and grab a coffee/beer if you are nearby.
110 Sportivnaya Street, Innopolis, Russia, 420500